
ПРИЛОЖЕНИЕ А
(справочное)
В данном приложении рассмотрены параметры вибрации ротора относительно вкладышей подшипников, на которых жестко закреплены датчики. Абсолютная же вибрация ротора определяется путем векторного сложения относительной вибрации ротора с абсолютной вибрацией самого вкладыша.
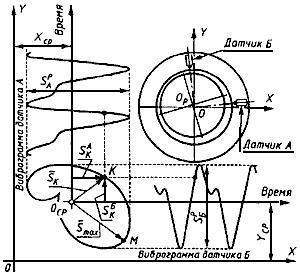
Вибрация ротора в любом его поперечном сечении определяется траекторией центра этого сечения (рисунок А.1). Форма траектории зависит от динамических характеристик ротора и опорной системы, места измерения вибрации (координаты вдоль оси ротора) и характера возбуждения. При гармонической вынуждающей силе траектория близка к эллиптической, но в определенных условиях она может трансформироваться в окружность или прямую линию. Время обхода центром сечения ротора траектории определяется периодом вынуждающей силы. Основная составляющая вынуждающей силы обусловлена, как правило, неуравновешенностью ротора, а ее частота равна частоте вращения ротора. Существуют и другие причины возбуждения, например неравножесткость ротора, - в этом случае частота возбуждения кратна частоте вращения. В тех случаях, когда вибрация возникает в результате самовозбуждения, траектория имеет сложную форму, в общем случае изменяющуюся во времени. Вибрация ротора представляет собой результат действия совокупности различных причин, поэтому траектория центра любого его сечения определяется векторной суммой виброперемещений, вызываемых отдельными составляющими вынуждающей силы.
 - система координат, связанная с подшипником;
- система координат, связанная с подшипником; ,
,  - координаты среднего положения центра сечения ротора;
- координаты среднего положения центра сечения ротора; - мгновенное положение центра
- мгновенное положение центра  сечения ротора;
сечения ротора; - среднее положение центра сечения ротора;
- среднее положение центра сечения ротора; - мгновенное виброперемещение центра сечения ротора от среднего положения ;
- мгновенное виброперемещение центра сечения ротора от среднего положения ; - максимальное виброперемещение центра сечения ротора от среднего положения ;
- максимальное виброперемещение центра сечения ротора от среднего положения ; ,
,  - текущие виброперемещения центра сечения ротора в направлении осей датчиков
- текущие виброперемещения центра сечения ротора в направлении осей датчиков  и
и  ;
; ,
,  - размах виброперемещений центра сечения ротора в направлении осей датчиков и
- размах виброперемещений центра сечения ротора в направлении осей датчиков и
Рисунок А.1 - Динамическая траектория ротора.
Определение виброперемещений
Траекторию центра сечения ротора определяют измерением его виброперемещений двумя датчиками, установленными в плоскости рассматриваемого сечения под углом 90°±5° относительно друг друга (отклонения от 90° в ту или иную сторону на угол до 5° не вызывают значительных ошибок). Этот способ измерения позволяет достаточно точно определить различные параметры прецессионного движения ротора относительно вкладышей его подшипников.
Наибольший интерес представляют переменные величины, определяющие форму траектории центра ротора. В некоторый момент времени центр сечения ротора находится в точке своей траектории, а перемещение от среднего положения равно . Мгновенные значения виброперемещения от среднего положения центра , измеренные с помощью датчиков и , равны соответственно и . Тогда
 . (А.1)
. (А.1)
Величины , , зависят от времени  , т.е. изменяются по мере того, как центр сечения перемещается по траектории. Как видно из рисунка А.1, на траектории есть точка
, т.е. изменяются по мере того, как центр сечения перемещается по траектории. Как видно из рисунка А.1, на траектории есть точка  , где виброперемещение от среднего положения максимально. Вектор виброперемещения, соответствующий точке , обозначают , а его модуль определяют по формуле
, где виброперемещение от среднего положения максимально. Вектор виброперемещения, соответствующий точке , обозначают , а его модуль определяют по формуле
 (А.2)
(А.2)
или с учетом совмещения осей координат  и
и  c осями датчиков и
c осями датчиков и
 . (A.3)
. (A.3)
Точка траектории, соответствующая , не обязательно совпадает с точками, где или имеют свои максимумы.
Измерения требуют знания значений среднего виброперемещения центра сечения ротора и . Эти значения определяют по формулам:
 , (А.4)
, (А.4) , (А.5)
, (А.5)
где  и
и  - переменные во времени текущие значения;
- переменные во времени текущие значения; - интервал времени, много больший периода составляющей вибрации наинизшей частоты.
- интервал времени, много больший периода составляющей вибрации наинизшей частоты.
Величины  и определяют среднее положение центра сечения ротора относительно статорных частей в плоскости измерения. Изменения среднего положения могут быть результатом влияния факторов, которые мало зависят от периодичности переменных величин, например виброперемещения подшипниковых опор, изменения характеристик масляного клина и т.д. Координаты среднего положения центра сечения ротора, полученные по формулам (А.4) и (А.5), не равны полусумме максимального и минимального значений виброперемещения (см. рисунок А.1), кроме случая гармонической вибрации ротора, когда траектория представляет собой эллипс.
и определяют среднее положение центра сечения ротора относительно статорных частей в плоскости измерения. Изменения среднего положения могут быть результатом влияния факторов, которые мало зависят от периодичности переменных величин, например виброперемещения подшипниковых опор, изменения характеристик масляного клина и т.д. Координаты среднего положения центра сечения ротора, полученные по формулам (А.4) и (А.5), не равны полусумме максимального и минимального значений виброперемещения (см. рисунок А.1), кроме случая гармонической вибрации ротора, когда траектория представляет собой эллипс.
Измерение может быть произведено системами, определяющими как средние, так и мгновенные значения. Расчет по сигналам двух датчиков является процедурой, требующей специального обеспечения.
Определение относительной вибрации упрощается при измерении размахов виброперемещений вала в направлении измерения, так как они не зависят от координат среднего положения центра сечения ротора , что делает излишним измерение как этих координат, так и отклонений от них. Размах виброперемещений, измеренный в двух взаимно перпендикулярных направлениях ( ,
,  ), используют для контроля вибрации валов наиболее часто.
), используют для контроля вибрации валов наиболее часто.
ПРИЛОЖЕНИЕ Б
(справочное)